Выбор типоразмеров гидроцилиндров и их привязка
![]() , кНм
, кНм
где ![]() кН – центробежные силы,
кН – центробежные силы,
где ![]() - масса i -го элемента, т;
- масса i -го элемента, т; ![]() - угловая скорость поворотной платформы в конце разгона, ориентировочно принимаем
- угловая скорость поворотной платформы в конце разгона, ориентировочно принимаем
Тогда
![]()
![]()
![]()
Этот момент не должен превышать допустимого момента [М] по условиям устойчивости экскаватора, для гусеничных экскаваторов - ![]() .
.

Условие Мсв ≤ [М] выполняется.
Схема привязки стрелового гидроцилиндра представлена на рис.10, где через а = ОсА обозначено расстояние от оси пяты стрелы до оси шарнира, соединяющего гидроцилиндр со стрелой, а через b = ОсОпц - расстояние между осями пят стрелы и гидроцилиндра. Найдем сначала показанные на рис. 10 углы ![]() и
и ![]() . Потребуем, чтобы сопротивления подъему рабочего оборудования в его крайних положениях преодолевались равными усилиями на штоке гидроцилиндра, для чего необходимо, чтобы было выполнено условие:
. Потребуем, чтобы сопротивления подъему рабочего оборудования в его крайних положениях преодолевались равными усилиями на штоке гидроцилиндра, для чего необходимо, чтобы было выполнено условие:
![]()
Приближенно, учитывая малость углов ![]() и
и ![]() , можно принять
, можно принять ![]() ;
; ![]() ;
; ![]() , после чего:
, после чего:
![]() ;
; ![]() .
.
где
Тогда

![]()
После отыскания углов ![]() и
и ![]() расстояния а и b определятся как
расстояния а и b определятся как
![]() , м;
, м;
![]() , м
, м
![]()
![]()
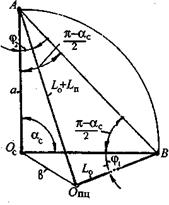
Рис. 10. Привязка стрелоподъемного гидроцилиндра.
2.4.4 Привязка гидроцилиндра привода рукояти
В качестве исходных данных для привязки гидроцилиндра привода рукояти используют размеры очертания удлиняющей части стрелы вместе с кинематической осью последней (по результатам построения конфигурации стрелы), положения кинематической оси рукояти, предельно отвернутой от стрелы 1 (рис. 11) и предельно подвернутой к ней 2 (из построений осевого профиля), размеры окончательно выбранного гидроцилиндра -ход поршня Lп и длина по концевым шарнирам с полностью втянутым штоком L0.
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта