Метрический и кинематический синтез и анализ исполнительного механизма
Длина кривошипа механизма равна половине заданного хода ползуна
r = S/2 = 0,16/2 = 0,08, м.
Длину шатуна l находим, ограничивая наибольший угол давления шатуна l на ползун αmax= [α] = 300, чтобы ползун не слишком сильно давил на направляющую стойки и не вызывал большую силу трения. Этот угол давления (угол между шатуном l и направляющей) будет иметь место, когда угол между кривошипом r и шатуном l составит 900 (при угле поворота кривошипа, равном 600). Исходя из этого:
l = r/tg [α] =0,08/tg 300 = 0,08/0,3 ≈ 0,27, м.
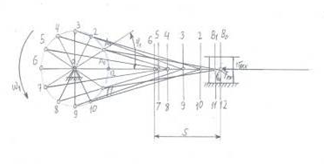
Планы двенадцати положений механизма в масштабе Кl = 4 мм/мм представлены на чертеже. Здесь механизм (в виде его кинематических схем) при неизменном положении вершин стоек изображён при двух горизонтальных и двух вертикальных положениях кривошипа, при угле поворота кривошипа φ1, равном [α] и 1800 + [α] и ещё в шести промежуточных положениях кривошипа. Планы положений показывают относительное положение звеньев механизма в процессе его движения. При расположении кривошипа и шатуна на одной прямой линии ползун находится в крайних положениях, расстояние между которыми S = 0,16 м.
Продолжительность одного оборота кривошипа
TЦ = 2S/vС = 2∙0,16/6,3 ≈ 0,05 с.
Угловая скорость (средняя) вращения кривошипа
ω1 = ωК = 2π/TЦ ≈ 2∙3,14/0,05 ≈ 125,6 1/с.
Функция положения ползуна, позволяющая вычислить расстояние от оси О вращения кривошипа до ползуна в любой момент времени t = φ1/ ω1, находится по формуле:
x = r cos φ1 + [l2 – (r sin φ1)2],
где x – расстояние от оси поворота кривошипа до центра шарнира на ползуне.
Функция скорости ползуна:
v = r ω1[![]() φ1 + (r/2l) sin 2 φ1],
φ1 + (r/2l) sin 2 φ1],
где ω1 − угловая скорость кривошипа;
φ1 − угол поворота входного кривошипа, отсчитываемый от горизонтальной оси против часовой стрелки, φ1 = ω1t.
Планы двенадцати положений кривошипно-ползунного механизма при углах поворота кривошипа φ1 = (0…360)0 с шагом Δφ1 = 300
Значение вычисленных скоростей при rω1 ≈ 10, 048 м/с, r/2l ≈ 0,15:
|
φ1, град |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
|
sin φ1 |
0 |
0,5 |
0,9 |
1 |
0,9 |
0,5 |
0 |
− 0,5 |
−0,9 |
− 1 |
-0,9 |
−0,5 |
|
sin 2φ1 |
0 |
0,9 |
0,9 |
0 |
−0,9 |
0,9 |
0 |
− 0,9 |
0,9 |
0 |
-0,9 |
−0,9 |
|
0,15 sin 2 φ1 |
0 |
0,1 |
0,1 |
0 |
−0,1 |
- 0,1 |
0 |
0,1 |
0,1 |
0 |
-0,1 |
−0,1 |
|
|
0 |
0,6 |
1 |
1 |
0,7 |
-0,4 |
0 |
-0,4 |
−0,7 |
− 1 |
-1 |
−0,6 |
|
v, м/с |
0 |
6,3 |
9,99 |
10,048 |
7,4 |
3,7 |
0 |
−3,7 |
−7,4 |
−10,048 |
−9,99 |
−6,3 |
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта