Расчетная динамическая модель автомобиля
Автомобиль представляет собой колебательную систему, состоящую из нескольких масс – кузова, колес, двигателя, кабины и др., связанных между собой упругими связями и демпферами. Эти массы делят, прежде всего, на подрессоренные и неподрессоренные. Подрессоренной частью автомобиля являются все его элементы, вес которых передается упругому устройству подвески. Те элементы, сила тяжести которых не передается через упругое устройство подвески, называют неподрессоренными элементами автомобиля. Таким образом, подрессоренными элементами автомобиля являются кузов и рама с укрепленными на ней механизмами, а не подрессоренными – колеса в сборе с осями (мостами).
Для исследования вертикальных колебаний автомобиля выбрана четырехмассовая система с пятью степенями свободы.
Дифференциальные уравнения второго порядка, описывающие поведение динамической модели, составлены с помощью уравнений Лагранжа второго рода. Уравнения движения получены при следующих допущениях:
· Колебания кузова и колес малые;
· Характеристика всех элементов линейна, кроме амортизаторов;
· Оси масс автомобиля совпадают с главными осями эллипсоида инерции;
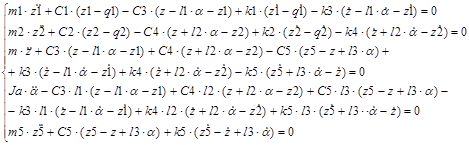
На автомобиль действуют только вертикальные силы, а горизонтальная плоскость проходит через центр тяжести кузова. Данная модель имеет пять степеней свободы, и её колебания описываются следующей системой дифференциальных уравнений второго Порядка:
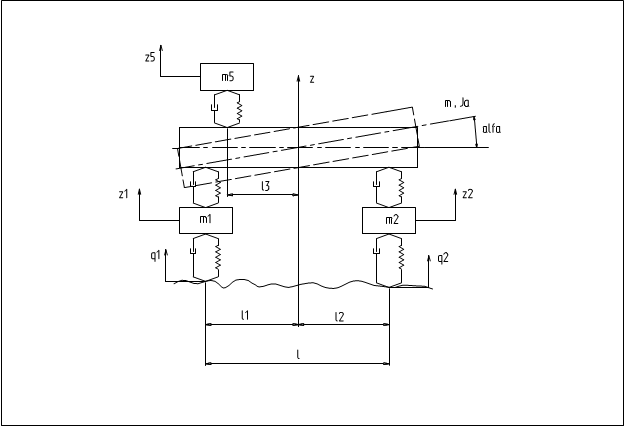
Рис. 2
где:
· м1-неподрессоренная масса передней оси автомобиля;
· м2- неподрессоренная масса задней оси автомобиля;
· м- подрессоренная масса автомобиля;
· Jа- момент инерции подрессоренной массы относительно поперечной оси автомобиля, проходящей через центр его масс;
· м5- масса сидения с водителем;
· С1 и К1 –жесткость и коэффициент демпфирования передних шин;
· С2 и К2- задних шин;
· С3 и К3- передней подвески;
· С4 и К4- задней подвески;
· С5 и К5- сидения автомобиля;
· l-база автомобиля ;
· l1 и l2- расстояние от центра масс до передней и задней осей автомобиля;
· l3- расстояние от центра масс автомобиля до крепления сидения;
· z1- вертикальное перемещение неподрессоренной массы передней оси автомобиля;
· z2-задней оси автомобиля;
· z- вертикальное перемещение центра масс автомобиля;
· a- угол поворота подрессоренной массы относительно центра масс автомобиля;
· z5- вертикальное перемещение человека.
Характеристики амортизаторов являются нелинейными и будут аппроксимироваться в виде кусочно-линейных функций.
Для численного решения уравнений их необходимо преобразовать в систему уравнений первого порядка. С этой целью произведём замену переменных:
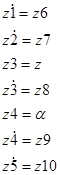
Получаем:
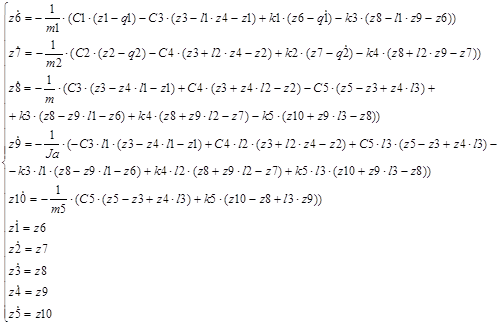
Возмущающая функция q (микропрофиль дороги) задаётся в виде массива чисел с достаточно мелким шагом.
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта