Кинетостатический и динамический анализ и синтез
rПР = mКР 0,5r + 0,5mШ r = 0,4∙0,5∙0,08 + 0,5∙1,35∙0,08 = 0,07 кг∙м.
Приняв rПР = 0,07 м, получим mПР = 0,07/0,1 = 0,7 кг.
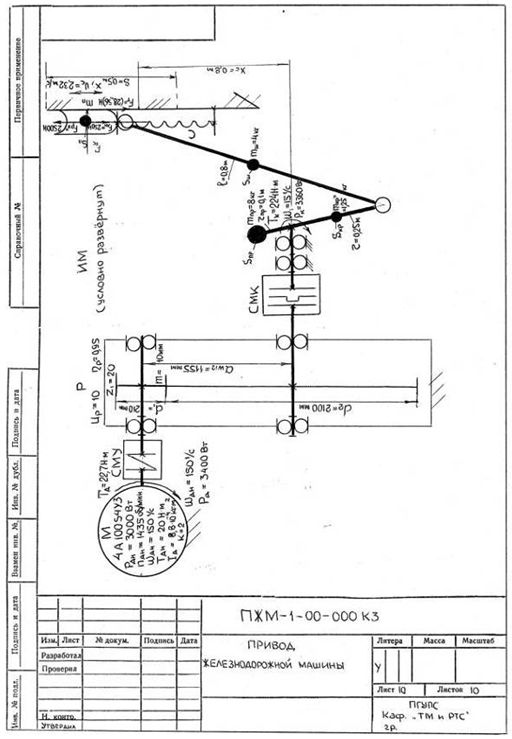
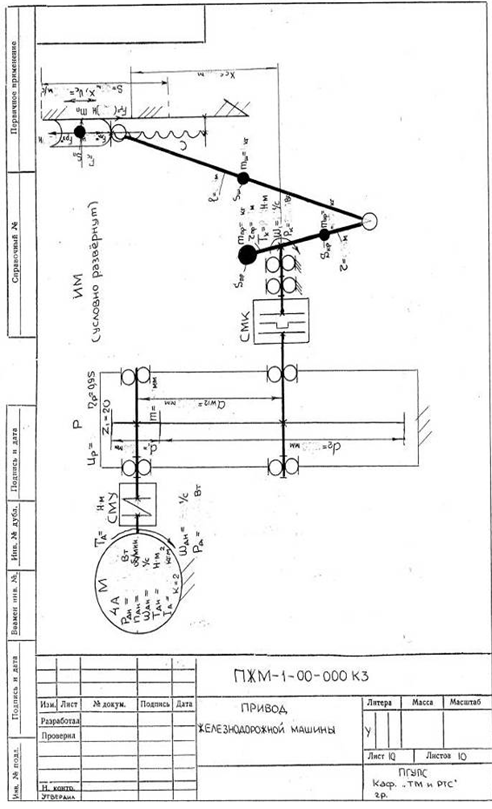
Таким образом, спроектирован привод железнодорожной машины, включающий электродвигатель М, вал ротора которого соединён упругой муфтой СМУ со входным валом зубчатого одноступенчатого редуктора Р внешнего зацепления. Выходной вал этого редуктора компенсирующей муфтой СМК соединён с валом кривошипа четырёхзвенного кривошипно-ползунного исполнительного механизма ИМ с исполнительным органом ИО на ползуне. Выходное звено его подпружинено пружиной разгружателя, а кривошип и шатун уравновешены, обеспечивая требуемую плавность движения.
Структурная схема спроектированной машины представлена на чертеже.
Структурная схема железнодорожной машины
Опорно – смысловая карта по ПМ, ТММ И ДМ
Основные характеристики некоторых электродвигателей по ГОСТ 01.01.63-77
|
Тип двигателя |
Мощность РДН, Вт |
Частота вращения nДН, об/мин |
GD2, кг*м2 |
К = TП/TН |
Диаметр вала dД , мм |
|
4A63B2Y3 |
550 |
2740 |
30 * 10-4 |
2 |
14 |
|
4A71A2Y3 |
750 |
2840 |
39 * 10-4 |
2 |
19 |
|
4A71B2Y3 |
1 100 |
2810 |
42 * 10-4 |
2 |
19 |
|
4A80A2Y3 |
1 500 |
2850 |
73 * 10-4 |
2.1 |
22 |
|
4A80B2Y3 |
2200 |
2850 |
35 *10-4 |
2.1 |
22 |
|
4A90 L 2Y3 |
3 000 |
2840 |
1,41 * 10-2 |
2.1 |
24 |
|
4A100 S 2Y3 |
4000 |
2880 |
2,37 * 10-2 |
2 |
28 |
|
4A100L2Y3 |
5 500 |
2880 |
3 * l0-2 |
2 |
28 |
|
4A112M2Y3 |
7 500 |
2900 |
4 * 10-2 |
2 |
32 |
|
4A132M2Y3 |
11 000 |
2900 |
9 * 10-2 |
1.7 |
38 |
|
4A160S2Y3 |
15000 |
2940 |
19 * 10-2 |
1.4 |
42 |
|
4A160M2Y3 |
18 500 |
2940 |
21 * 10-2 |
1.4 |
42 |
Размещено на Allbest.ru
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта