Структурный анализ и синтез исполнительного механизма
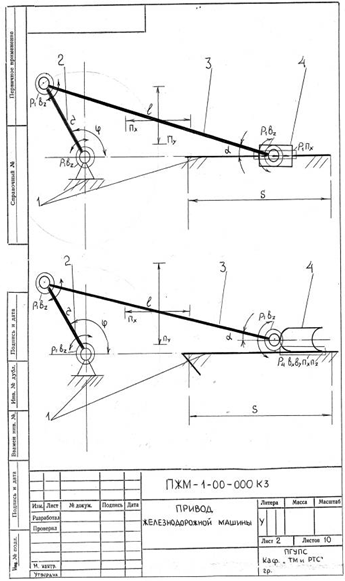
Исполнительный рычажно-ползунный механизм, заданный последовательностью трёх вращательных и одной поступательной кинематической пары, представляет собой кривошипно-ползунный механизм, представленный на чертеже. Он состоит из четырёх звеньев (n = 4): кривошипа 1, шатуна 2, ползуна 3 и стойки 4. Эти звенья входят друг с другом в p1 = 4 одноподвижные кинематические пары: 4-1 – вращательная; 1-2 – вращательная; 2-3 – вращательная и 3-4 – поступательная. Подвижных звеньев nП = (n – 1) = 3: звенья 1, 2 и 3, неподвижных 1: звено 4. Неизменяемый, замкнутый на стойку контур звеньев в этом механизме имеется один:
К = p1 – (n – 1) = 4 – 3 = 1
Вращательные пары реализуют в механизме смещения ВZ звеньев 1 и 2, поступательная пара – смещение ПX ползуна, срединные точки шатуна имеют составляющую смещения ПY. Всего смещений три, поэтому механизм относится к третьему семейству (N = 3). Подвижность механизма:
W = N (n – 1) − (N – 1) p1 = 3∙3 – (3 – 1)∙4 = 9 – 8 = 1.
Избыточных связей в сопряжениях звеньев имеется q = 6 – N = 6 – 3 = 3 это необходимость для нормальной работы выполнять оси всех вращательных пар параллельными, неперекошенными относительно плоскости движения звеньев, а все звенья располагать так, чтобы они перемещались в параллельных плоскостях.
электромеханический привод железнодорожный машина
Для хорошей работы избыточные связи следует устранять, выполняя кинематические пары так, чтобы сумма подвижностей их была равна 7 и имела все 6 реализованных или возможных движений. Этому условию отвечает механизм с последовательностью пар в1в1в1п4 (см. рис. на чертеже), или в1в2в2п2 , или в1в2в3п1.
Такие механизмы при наличии у них возможности разворачиваться и смещаться звеньям по трём координатным осям будут статически определимыми, самоустанавливающимися, не требующими высокой точности изготовления деталей механизмов и их сборки, не заклинивающимися при деформациях деталей звеньев (в том числе и стойки) и перепадах температур.
Структурная схема исходного выполнения кривошипно-ползунного механизма и одного из вариантов выполнения без избыточных связей
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта