Синтез системы
Составим структурную схему разомкнутой системы рулевого привода с жесткой обратной связью и определим значения коэффициентов.
Структурная схема разомкнутой системы рулевого привода показана на рис 1:
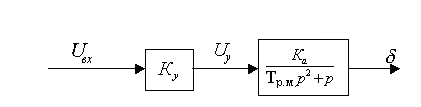
Рис. 1. Структурная схема разомкнутой системы рулевого привода
Для определения коэффициента Ку смоделируем структурную схему разомкнутой системы рулевого привода с жесткой обратной связью в программной среде MathLab 6.5.
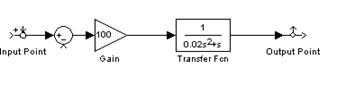
Рис. 2. Структурная схема разомкнутой системы рулевого привода в среде MathLab 6.5
Приведем ЛАФЧХ разомкнутой системы рулевого привода с жесткой обратной связью при значении коэффициента Ку=100
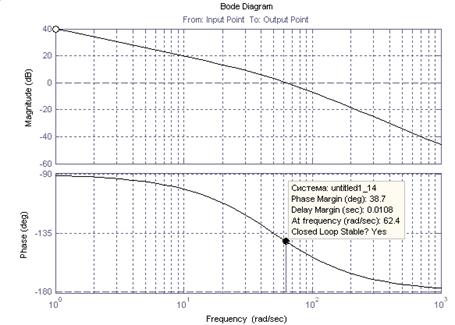
Рис. 3. ЛАФЧХ рулевого привода разомкнутой системы
Из графика видно, что при значении коэффициента Ку=100 запас по фазе составляет φ=38,7˚. Из этого следует, что данная система устойчива.
Составим структурную схему замкнутой системы рулевого привода с жесткой обратной связью и определим значение коэффициента Кос.
Структурная схема замкнутой системы рулевого привода с жесткой обратной связью имеет вид показана на рис. _
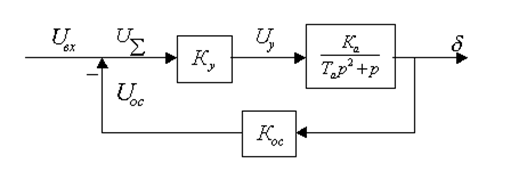
Рис. 4. Структурная схема замкнутой системы рулевого привода с жесткой ОС
Для определения коэффициента Кос смоделируем структурную схему замкнутой системы рулевого привода с жесткой обратной связью в программной среде MathLab 6.5.
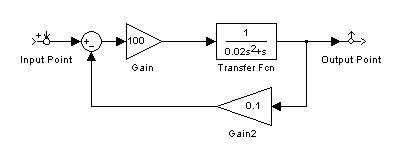
Рис. 5. Структурная схема замкнутой системы рулевого привода с жесткой ОС в среде MathLab 6.5
Приведем ЛАФЧХ замкнутой системы рулевого привода с жесткой обратной связью при значении коэффициента Кос=0.1 (рис. 6):
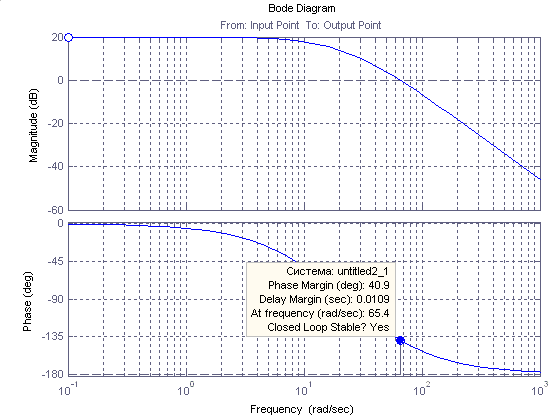
Рис. 6. ЛАФЧХ рулевого привода замкнутой системы
Из графика видно, что при значении коэффициента Кос=0.1 запас по фазе составляет φ=40.9˚. Из этого следует, что данная система устойчива.
График переходного процесса в замкнутом рулевом приводе с жесткой обратной связью имеет вид при значении коэффициентов Ку=100 и Кос=0.1:
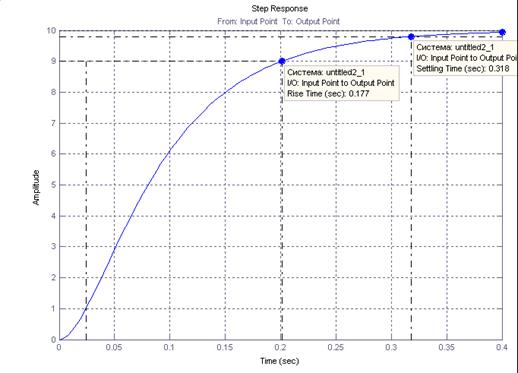
Рис. 7. Переходный процесс в рулевом приводе
Из графика рис. 7 видно, что время переходный процес в замкнутом рулевом приводе с жесткой обратной связью при значении коэффициентов Ку=1, Кос=0.1 имеет следующие параметры:
Время переходного процесса – 0.318 сек.
Время нарастания – 0.177 сек.
Установившееся величина – 10 град.
Составим структурную схему разомкнутой системы управления автопилотом и определим значение коэффициентов Кп, К1 .
Структурная схема разомкнутой системы управления автопилотом имеет вид:
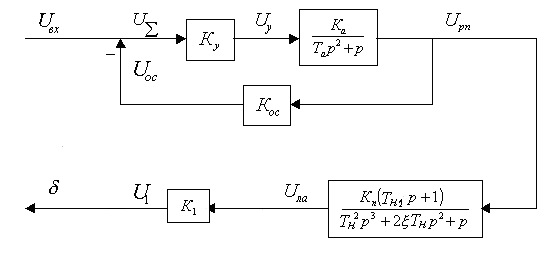
Рис. 8. Структурная схема разомкнутой системы управления автопилотом
Для определения коэффициентов Кп, К1 смоделируем структурную схему разомкнутой системы управления автопилотом в программной среде MathLab 6.5 (рис 9).
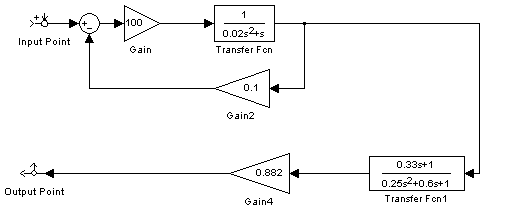
Рис. 9. Структурная схема разомкнутой системы управления автопилотом в среде MathLab 6.5
Приведем ЛАФЧХ разомкнутой системы управления автопилотом:
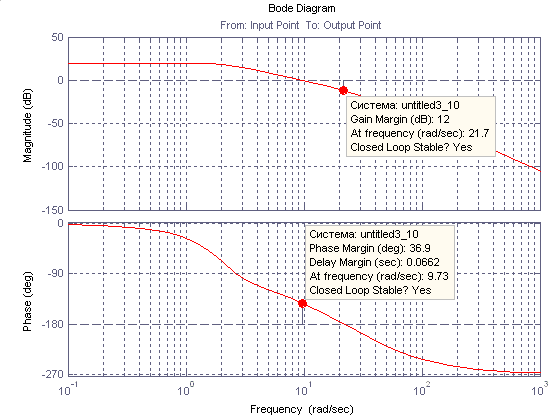
Рис. 10. ЛАФЧХ разомкнутой системы управления автопилотом
Приняв Кп=1 и построив графики ЛАФЧХ разомкнутой системы управления автопилотом (рис. 10), можно сказать, что при значении коэффициента, К1=0.882, запас по фазе составляет Δφ=36,9˚, а запас по амплитуде ΔL =12Дб. Из этого следует, что данная система устойчива.
Составим структурную схему замкнутой системы по отношению к внешнему управляющему моменту и построим ЛАФЧХ и график переходного процесса этой системы.
Структурная схема замкнутой системы по отношению к внешнему управляющему моменту показана на рис 11.
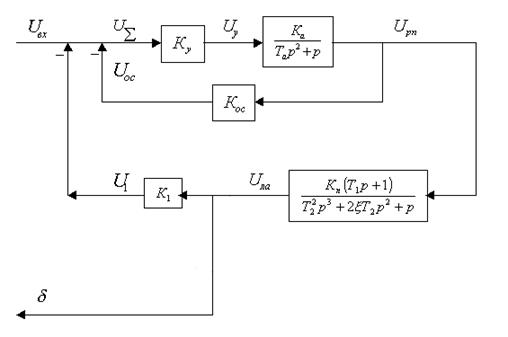
Рис. 11. Структурная схема замкнутой системы управления автопилотом по отношению к внешнему управляющему моменту
Согласно техническому заданию коэффициент по управляющему моменту равен 1. С учетом этого построим ЛАФЧХ и график переходного процесса этой системы. Смоделируем структурную схему замкнутой системы по отношению к внешнему управляющему моменту в программной среде MathLab 6.5 (рис. 12).
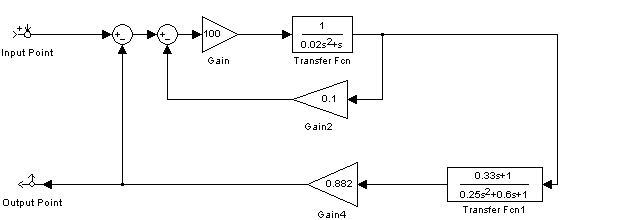
Рис. 12. Структурная схема замкнутой системы управления автопилотом по отношению к внешнему управляющему моменту ОС в среде MathLab 6.5
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта