Рулевой привод с жесткой обратной связью
Жесткая обратная связь ![]() обеспечивает пропорциональность угла отклонения руля величине управляющего сигнала и слабую зависимость этого отклонения от шарнирного момента. Сигнал, пропорциональный углу отклонения руля, при помощи обратной связи сравнивается с управляющим сигналом. В качестве элемента обратной связи может быть использован потенциометрический датчик, измеряющий угол отклонения руля. На рис.2 показана структурная схема рулевого привода с жесткой обратной связью.
обеспечивает пропорциональность угла отклонения руля величине управляющего сигнала и слабую зависимость этого отклонения от шарнирного момента. Сигнал, пропорциональный углу отклонения руля, при помощи обратной связи сравнивается с управляющим сигналом. В качестве элемента обратной связи может быть использован потенциометрический датчик, измеряющий угол отклонения руля. На рис.2 показана структурная схема рулевого привода с жесткой обратной связью.
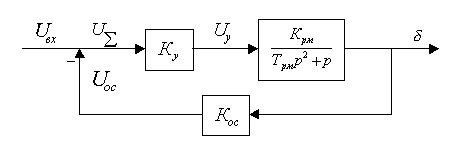
Рис.2. Структурная схема рулевого привода с жесткой обратной связью
Передаточная функция рулевого привода:
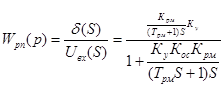
или
![]()
где ![]() - постоянная времени рулевого привода,
- постоянная времени рулевого привода, 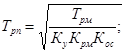
![]() - степень затухания колебаний рулевого привода,
- степень затухания колебаний рулевого привода,
![]()
![]() -коэффициент передачи рулевого привода,
-коэффициент передачи рулевого привода, ![]()
Введение жесткой обратной связи, кроме обеспечения пропорциональности угла отклонения руля величине управляющего сигнала, снижает постоянную времени рулевого привода, т. е. увеличивает его быстродействие. Частота собственных колебаний рулевого привода  должна быть примерно на порядок выше частоты угловых колебаний ЛА.
должна быть примерно на порядок выше частоты угловых колебаний ЛА.
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта