Уравнение движения рыскания
Допустим, что ЛА совершает горизонтальный полет с постоянной скоростью и управляется автопилотом. Для получения уравнений движения рыскания приравняем проекции внешних и инерционных сил на нормаль (ось Oz) к траектории, а также внешний и инерционный моменты относительно нормальной оси ЛА (оси Oyc):
где Z – боковая аэродинамическая сила;
Y - угол поворота траектории;
Iy – момент инерции ЛА относительно связанной оси Oyc;
wy – скорость рыскания (угловая скорость ЛА относительно оси Oyc);
My – аэродинамический момент рыскания.
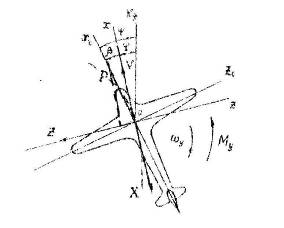
Рис.1. Схема сил и моментов действующих на объект
Линейные дифференциальные уравнения движения рыскания имеют вид:
 ,
,
где для постоянных коэффициентов введены следующие обозначения:
Нулевой индекс у скобок обозначает, что производная и параметры взяты для выбранного невозмущенного движения.
В некоторых случаях уравнения движения рыскания еще более упрощают. Дальнейшее упрощение этих уравнений основывается на том, что в большинстве режимов полета руль направления устраняет скольжение и можно положить, что Db=0. Тогда движение рыскания будет описываться одним уравнением:
![]()
Это же уравнение описывает движение ЛА, нейтрального в путевом отношении, т.е. ЛА, у которого коэффициент момента путевой устойчивости равен нулю: ![]() .
.
Если пренебречь движением центра масс под действием боковых сил и рассматривать лишь колебания продольной оси ЛА относительно вектора скорости, т.е. положить Db=Dy, то уравнение движения примет вид:
![]()
Разделы
- Главная
- Понятие и значение экономики транспорта
- Проектирование участка улицы
- Тепловозы на природном газе
- Особенности транспортной логистики
- Экспорт транспортных услуг
- Электрооборудование автомобилей
- Материалы
- Карта сайта